

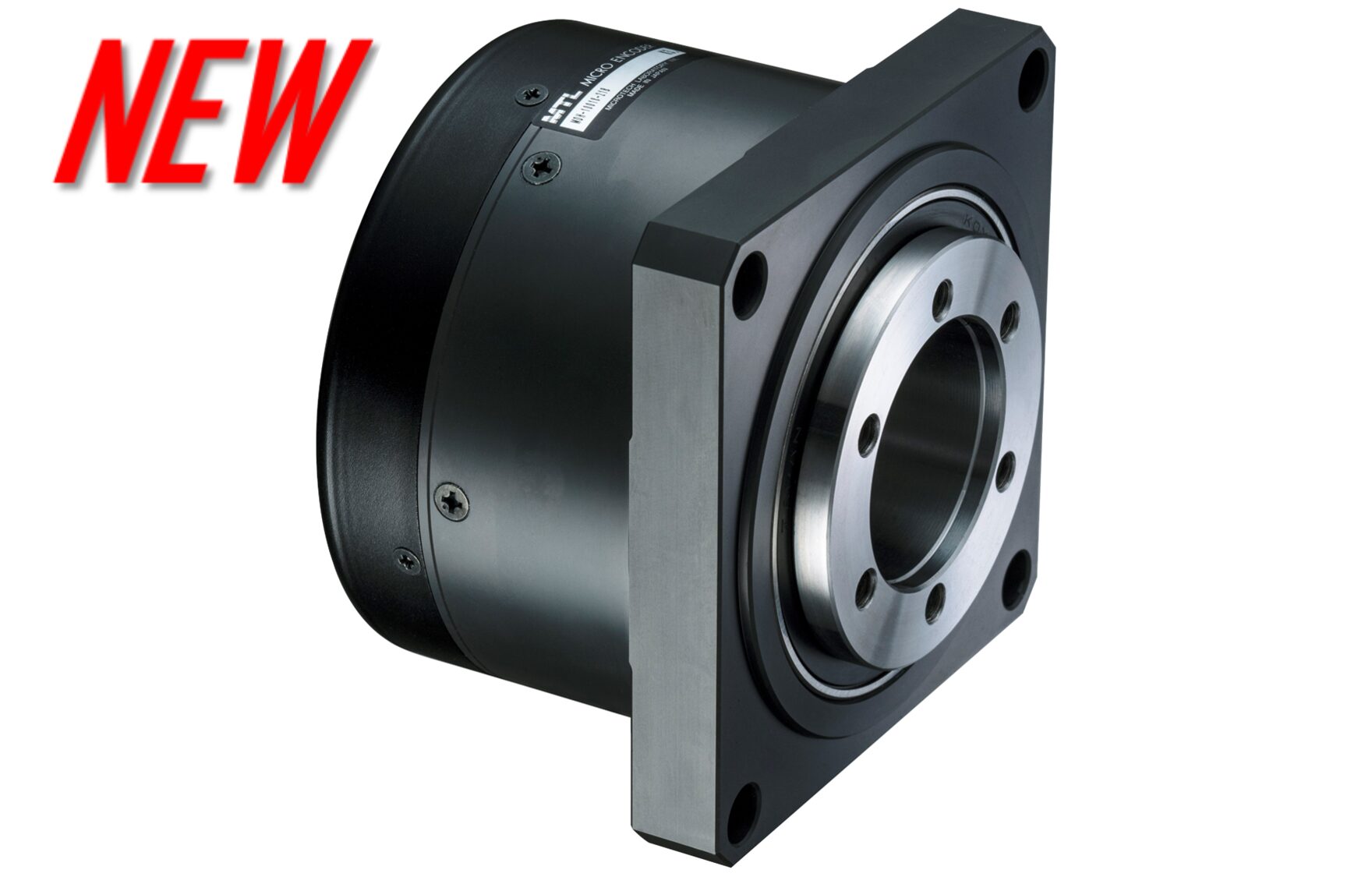
MDH-100 Series
A new φ100 size has joined the μDD Motor lineup. This is the highest-torque μDD motor in the series, with peak torque of 9.6 Nm.


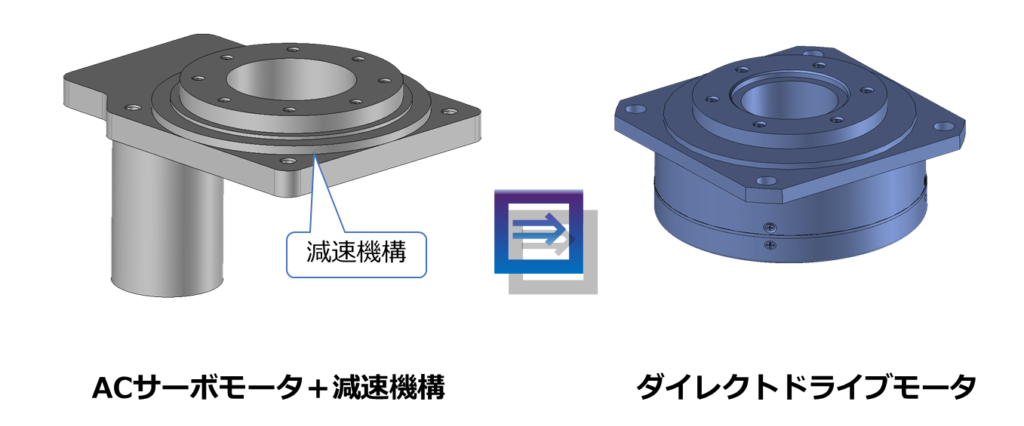
A DD motor, or direct drive motor, is a motor that drives the load directly without using a gearbox or belt.
Because the mechanism is simple, there is no backlash or wear caused by transmission components, which helps achieve quiet operation, long service life, and highly accurate positioning.
A key feature is its ability to generate high torque at low speed, making it widely used in fields that require precision and reliability, such as industrial robots, inspection equipment, and medical devices.
Our μDD motors deliver high torque in a world’s smallest-class size, contributing significantly to space saving and lighter equipment design.
This is a drive method in which the motor rotates the load directly without using a gearbox or gears.
Because there is no gear wear or backlash, it enables highly accurate positioning and smooth motion.
Since fewer components are required, the entire machine can be made smaller and lighter, while also improving quietness and service life.
It also offers advantages such as lower maintenance cost and improved safety, making it an ideal structure for precision equipment and robotic motion.
Backdrivability refers to the ability of a motor output shaft to rotate smoothly in reverse when external force is applied.
In general motors that use gears or reducers, the shaft is difficult to move when external force is applied, which makes flexible motion difficult.
In contrast, motors with excellent backdrivability respond naturally to external force, giving a smooth feel almost like moving something by hand.

Because no gears are used, there is no play or backlash, making micron-level positioning possible.
Because no gearbox or belt is required, the entire machine can be designed in a more compact form.
Because there is less mechanical friction, DD motors offer excellent quietness and smooth motion.
Because there are fewer wear parts and long service life, maintenance effort and cost can be reduced.
Because of high backdrivability, the system can operate more safely even when interacting with people.
The hollow-shaft structure allows cables and tubing to pass through the motor, simplifying machine design.
Because there is no gear sliding noise, the working environment improves and abnormal machine sounds are easier to notice.
Because the system is gearless, there is no backlash, which improves the accuracy of the drive section.
Fewer parts help reduce machine size and save installation space.
Because there is less inertia and less mechanical loss, torque can be used more efficiently for acceleration and deceleration.
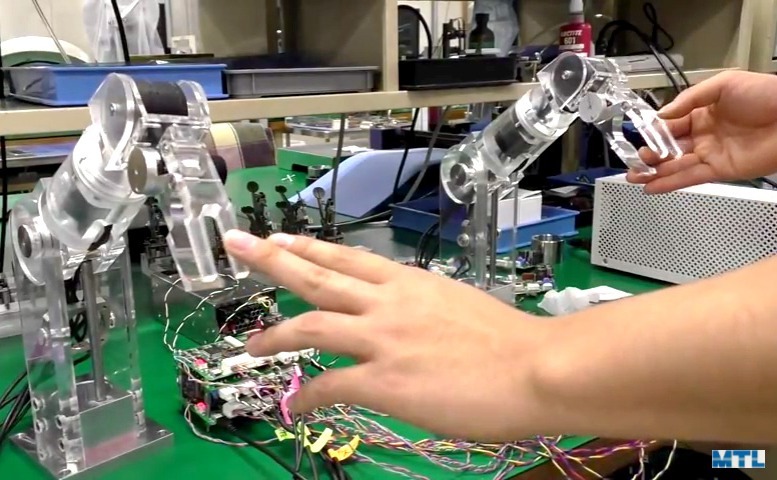
This characteristic is advantageous for haptic feedback in master-slave control.
Learn more about master-slave control ➡︎
A new φ100 size has joined the μDD Motor lineup. This is the highest-torque μDD motor in the series, with peak torque of 9.6 Nm.

Compact motor with a large-diameter hollow shaft. Ideal for index tables. A strong alternative to rotary actuators, and well suited for robots, equivalent to elbow and shoulder axes.

Compact motor with a large-diameter hollow shaft. Ideal for end effectors and robot joints.

Expanded inner-diameter version of the MDH-40 series. Cables, lasers, and other components can be routed through the φ12 mm bore.

Ideal for end effectors, transfer θ axes, alignment applications, production equipment automation, and robot wrist-class joints.

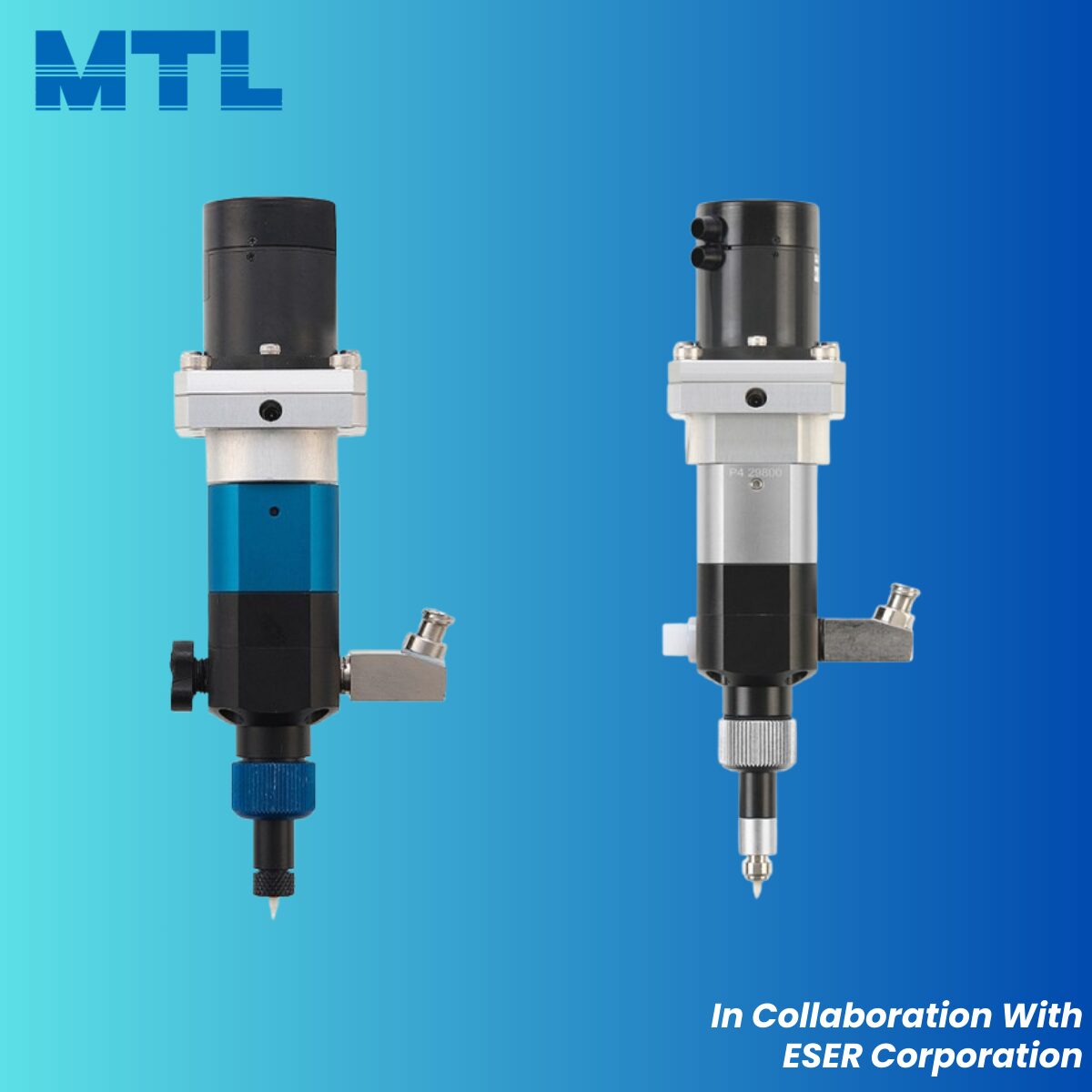
Ideal for high-precision dispensers and compact gimbal drives. Threads can be added inside the hollow shaft, and a rotary joint can be installed to pass an air tube through the center.

World’s smallest-class through-shaft servo motor. Ideal for end effectors, including hands, grippers, and Zθ units. Also suitable for compact hands when combined with a low reduction-ratio gear.

The world’s smallest direct drive motor. Ideal for grippers and robot hands handling lightweight workpieces such as electronic components.
The μDD motor, or micro direct drive motor, is a world’s smallest-class direct drive motor independently developed by Microtech Laboratory.
Unlike conventional motors, it uses a gearless drive structure that transmits motor rotation directly to the load without a reducer, eliminating backlash and wear while enabling smooth, highly accurate motion.
It is specially designed to deliver high torque in the low-speed range, making it suitable for applications that require precise positioning and reliability, such as semiconductor manufacturing equipment, inspection systems, and industrial robots.
In addition, the motor integrates a high-resolution encoder for accurate control down to very fine angular movement. Its hollow-shaft structure also allows cables and air tubes to pass through the center, helping reduce equipment size and improve design flexibility.
Combining compact size with high torque, high precision, and quiet operation, the μDD motor is an innovative solution for next-generation motion control where conventional drive systems cannot meet performance requirements.

Eliminate the 3 losses on the factory floor
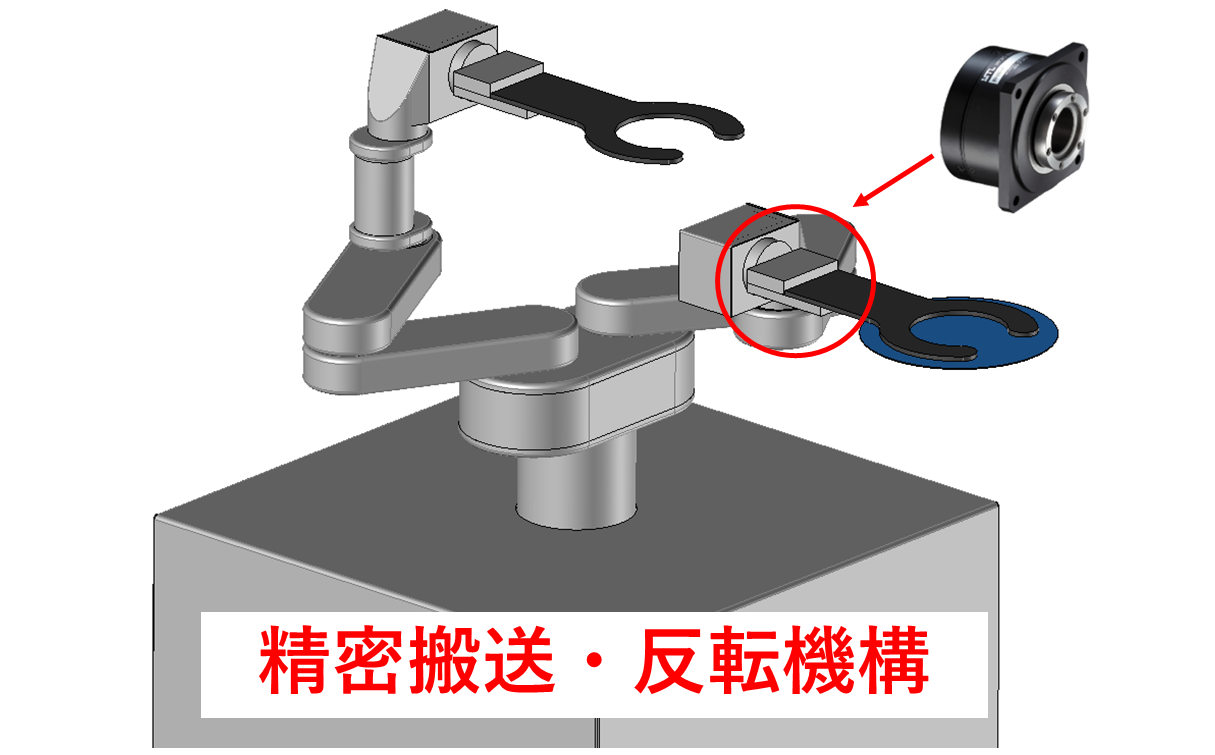
Adoption Example
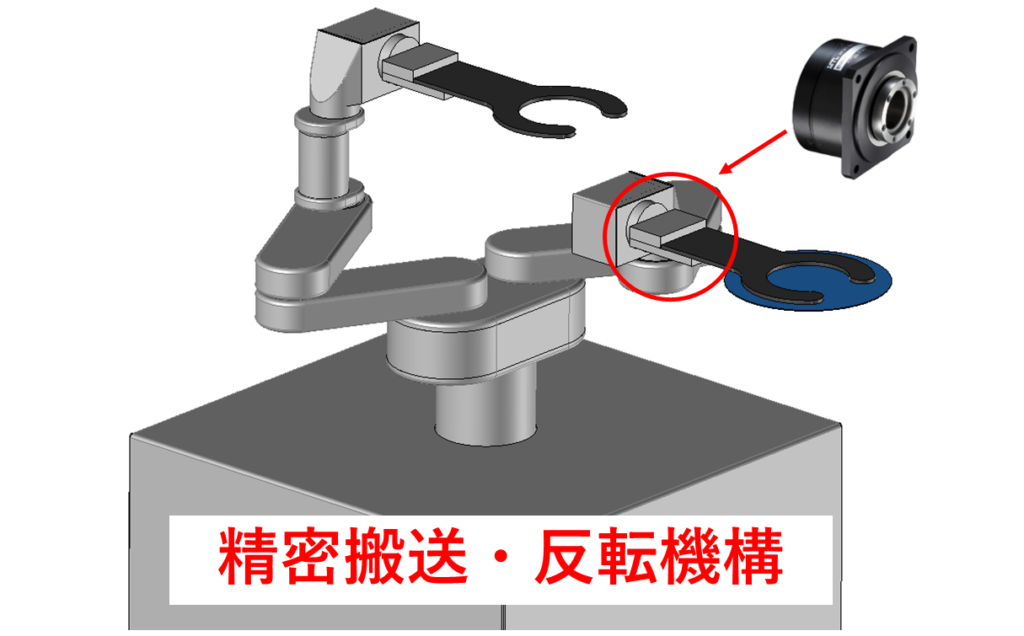
The gearless structure eliminates vibration and backlash, enabling delicate wafers to be inverted smoothly and reliably. It also contributes to lighter overall equipment and a more compact design, supporting high productivity and stable operation in semiconductor manufacturing processes.
Customization Example

An M5×0.8 thread was added inside the hollow shaft of the MDH-30 series.
This allows direct connection of a rotary joint.


Compact, lightweight, high precision
Mainly used in back-end processes. A hollow-structure motor with the flexibility to solve space and layout challenges.
<Download brochure>
High-precision rotary control in limited spaces. Used in space-saving testing equipment.
Ideal for coaxial laser attenuator systems and for high-precision hollow motors in gimbal pan-tilt applications.
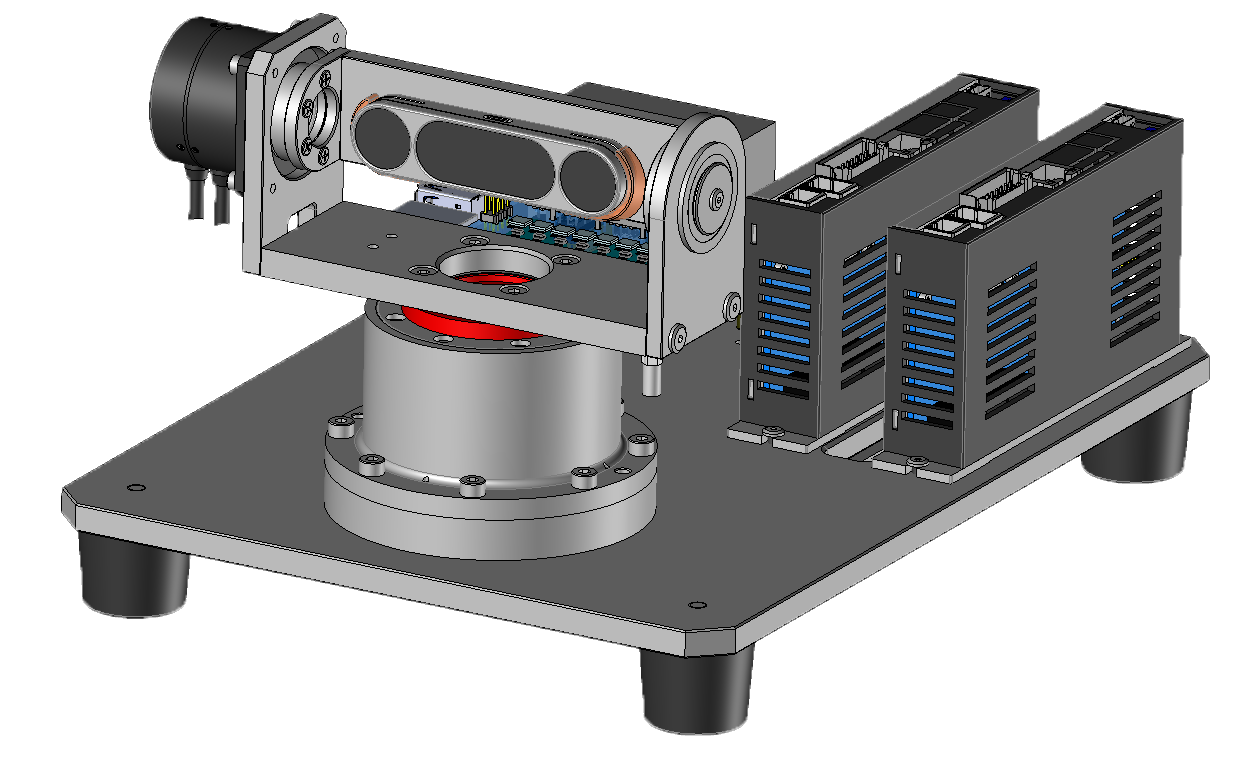
Compact high torque helps reduce robot size, while the large hollow bore also makes cable routing easier.
Its high backdrivability is highly valued in control systems with haptic feedback.
| Item | Stepping Motor | AC Servo Motor | DD Motor | μDD Motor |
|---|---|---|---|---|
| Repeatability | ○ | ○ | ◎ | ◎ |
| Absolute Accuracy | - | ○ | ○ | ◎ |
| Heat Generation | △ | △ | ○ | ◎ |
| Rigidity | △ | ○ | ◎ | ◎ |
| Hollow Shaft | ○ | ○ | ◎ | ◎ |
| Size | ◎ | ○ | △ | ◎ |
| Torque | ○, gearless | ○, gearless | ◎, gearless | ◎, gearless |
| Suitable Speed Range | Medium to High Speed | Medium to High Speed | Low to Medium Speed | Low to Medium Speed |
| Speed Ripple, at Low Speed | × | △ | ◎ | ◎ |
| Backdrivability | × | △ | ◎ | ◎ |
| Main Structure | Gear, Belt | Gear, Belt | Direct Drive | Direct Drive |
| Cost | Low | Medium | High | High |
| Typical Best-Fit Applications | High-Speed Rotation | Basic Positioning | Large Precision Rotation | Compact Precision Rotation |

Once you contact us, a dedicated representative will support your motor selection.
For motor and driver selection, please click here
Our hardware products are managed under a strict quality assurance system and have passed multiple tests.
In the unlikely event of an initial defect, we will replace the product free of charge.
Our after-sales service includes repair support and root-cause analysis for performance issues.
• Tuning support
• Auto-tuning function
Implementation procedure and actual performance data are available here
Released in 2024
• Further optimization with manual tuning
Tuning recipes and procedures are available here (user registration required)
To request paid tuning support by MTL engineers, click here
• You can also use drivers that your team is already familiar with.
Supported manufacturers are listed here
Q What type of motor is a μDD motor?
A It is an AC servo motor. The driver power supply voltage is DC, but internally it uses a three-phase PM rotor. It enables smooth position and speed control from ultra-low speed to high speed, as well as highly accurate current control.
Q Why can μDD motors achieve high-precision positioning?
A MTL’s motor core uses finer slot division than typical motors from other manufacturers. In addition, the integrated encoder has high resolution and monitors position more finely, which enables highly accurate positioning.
Q One of the features of equipment using μDD motors is quiet operation. Why is it quieter?
A Because equipment built with a direct drive mechanism eliminates the mechanical friction noise caused by high motor speed and the sliding friction noise generated by reducers.
Q Can it replace an existing motor?
A In addition to torque, current, and speed control using MTL drivers, it can also be connected to Mitsubishi Electric MELSERVO-J5 and Panasonic MINAS series drivers. Please contact us for specific model selection.
Q Is there a comparison table with conventional motors?
A The comparison with conventional motor-plus-gear actuators is shown below.
| Item | Conventional Motor + Gear | μDD Motor |
| Backlash | Present | None |
| Installation Space | Tends to be large | Can be compact |
| Quietness | Friction noise present | Very quiet |
| Maintenance | Wear parts required | Almost none |

Since its founding in 1981, Microtech Laboratory Co., Ltd. has grown as a specialized manufacturer of compact, high-precision rotary encoders and direct drive motors.
Headquartered in Sagamihara, Kanagawa, Japan, we supply products to a wide range of fields including precision equipment, robotics, and semiconductor manufacturing systems. Our strength lies in proprietary technology that delivers high performance in a compact form.
Our world’s smallest-class DD motor, the μDD motor, integrates a high-resolution encoder and combines highly accurate gearless control with quiet operation.
Its large hollow-shaft structure also improves design flexibility and contributes to smaller equipment. We also support custom orders from a single unit, allowing us to respond flexibly to high-mix, low-volume needs.
The agility that large manufacturers cannot easily match, together with more than 40 years of development experience, is our greatest strength.
| Company Name | Microtech Laboratory Co., Ltd. |
|---|---|
| Date Established | February 1, 1981 |
| Capital | 45.5 million yen |
| President and Representative Director | Yusuke Nomura |
| Business Activities | Design, manufacture, and sales of rotary encoders, Micro Encoders, and direct drive motors, μDD Motors |
| Fiscal Year-End | July 31 |
| Head Office | 8-1-46 Kamitsurumahoncho, Minami-ku, Sagamihara-shi, Kanagawa 252-0318, Japan |
| Contact | TEL: 042-746-0123 Main line FAX: 042-746-0960 |
| Main Banks | Bank of Yokohama, Sagami-Ono Branch MUFG Bank, Machida Branch Mizuho Bank, Machida Branch |
| Major Customers | IHI Corporation / IHI Logistics & Industrial Systems / Okubo Gear Co., Ltd. / Shoto Seisakusho Co., Ltd. / JEOL Ltd. / Hitachi High-Tech Science Corporation / Ono Sokki Co., Ltd. / Olympus Corporation / Harmonic Drive Systems Inc. / Canon Inc. / FUJIFILM Corporation / Sony Corporation / Honda R&D Co., Ltd. / Toshiba Corporation / Panasonic Corporation / Toyota Motor Corporation / Makino Milling Machine Co., Ltd. / Mitutoyo Corporation / Nikon Corporation / Moriya Transport Machinery Co., Ltd. / Yuyama Manufacturing Co., Ltd. / Sanyo Denki Co., Ltd. / and others |