Leader-Follower Control, Master-Slave Control, and Bilateral Robotics
Contents
- What Is Leader-Follower Control, Master-Slave Control?
- Advantages
- Use Cases
- What Is Bilateral Control?
- What Can It Do?
- Example of a Leader-Follower, Master-Slave System Configuration
- Why Is Reaction Force Detection Possible with a Simple Configuration?
What Is Leader-Follower Control, Master-Slave Control?
Master-slave is a control method in which multiple devices work together by dividing roles between a “master” device, which controls and operates multiple devices, and a “slave” device, which operates under the unilateral control of the master device. (Wikipedia)
Advantages
Intuitive operation.
By adding a bilateral control function, the system becomes even more intuitive.
Use Cases
Example 1, Pole Pruner, Mechanical Master-Slave
Because the operator can feel the cutting sensation, it has reaction force feedback.
Example 2, Mouse, Pointing Device
The mouse is the master, and the pointer is the slave.
Even if the pointer hits the edge of the screen, the user cannot feel it through the mouse, so it has no reaction force feedback.
Example 3, da Vinci Surgical Robot
An applied example of master-slave control.
The doctor operates the master, and the slave follows to perform the surgery.
In conventional surgery, incisions had to be made as large as necessary to secure visibility and working range.
With the da Vinci system, visibility is secured by an endoscope, and the slave arms are designed to be thinner and longer than a human hand.
As a result, the required incision area can be reduced. (It also makes it possible to operate on areas that were difficult to treat with conventional surgery.)
Benefits of da Vinci
Minimally invasive, less bleeding during surgery, smaller incisions, less postoperative pain, faster recovery, improved preservation of bodily functions
Example 4, Real Haptics Prosthetic Hand
The master is a foot pedal, and the slave, the prosthetic hand, moves according to how far the pedal is pressed.
Because the force sensed by the prosthetic hand is fed back to the foot pedal, the operator can adjust grip force more naturally.
What Is Bilateral Control?
Bilateral control means that the force received by the remote slave is also transmitted back to the operator, in other words, force and tactile sensation are fed back to the operator.
This allows the operator to control the system more intuitively.
It moves toward a tighter coupling of the sensory and motion systems between the robot and the operator, tele-existence and telepresence.
Ultimately, it enables the operator to work almost as if they had become the robot itself.
What Can It Do?
Remote Operation
Teleoperation
As long as the master and slave are electrically connected, the system can operate not only through wired connections but also wirelessly.
There is delay proportional to distance, but improving communication speed continues to reduce latency.
The spread of 5G is especially promising.
Motion Scaling, Enlargement and Reduction
Scaled Teleoperation, Micromanipulation
It becomes possible to perform delicate micron-level tasks that humans cannot handle directly, as well as manipulate objects weighing several tons, through a master-slave system.
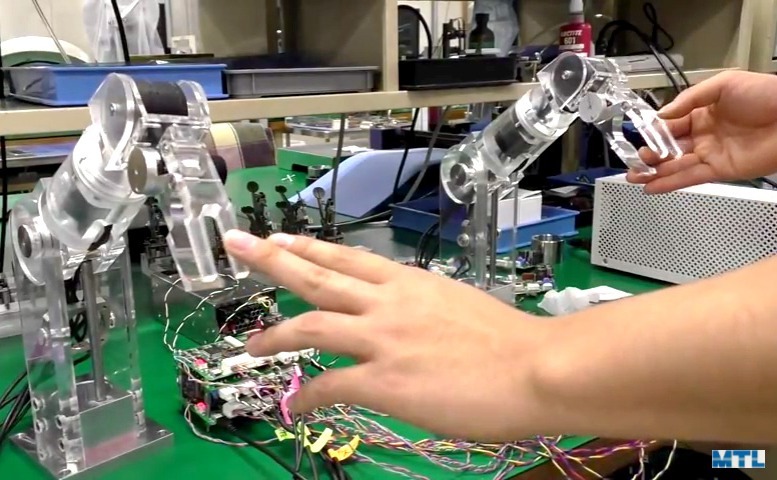
Example of a Master-Slave System Configuration
A master-slave hand with reaction force feedback built by students
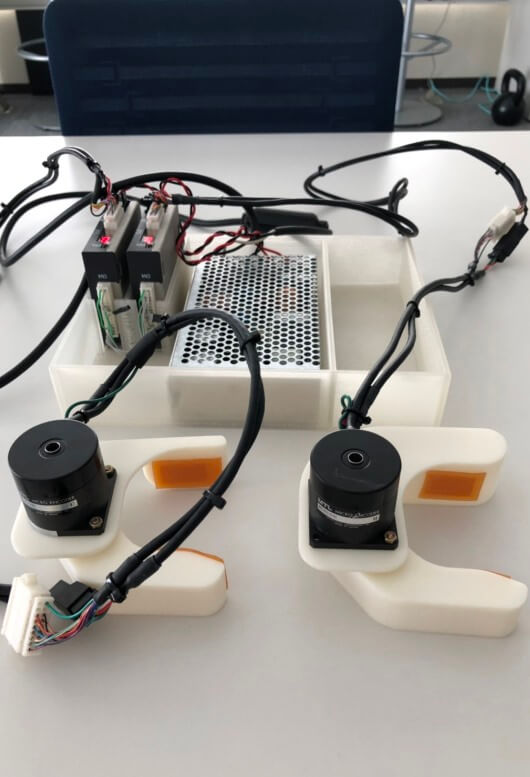
Components used
① μDD Motor: MDH-4018-324KE ×2
② Dedicated driver: MC-110-4810 ×2 (currently discontinued. The successor model is MC-200-7220.)
③ Master-slave cable ×1
④ 48 V power supply ×1
⑤ Hand parts, fabricated with a 3D printer
Assembly procedure
(1) Connect the motor and driver with connectors. Prepare two sets, one for the master and one for the slave.
(2) Connect the two drivers using the master-slave cable.
(3) Supply power, and master-slave operation becomes possible.
(4) Adjust the gain, tuning to optimize positioning accuracy and reaction force feedback.
Why Is It Possible to Build a Master-Slave System with Reaction Force Detection in a Simple Configuration?
Good Backdrivability
This refers to how easily the output joint rotates due to external force, and it changes depending on the power transmission mechanism and reduction ratio.
In general, when high-reduction-ratio gears are used, as in industrial robots and manipulators, the friction force and inertia appearing at the output joint become larger, and backdrivability worsens.
A high reduction ratio worsens backdrivability, while a lower reduction ratio improves it.
High Torque
A reducer is mainly used to amplify torque.
So even if you want to reduce the reduction ratio, you cannot do so unless the required torque is still available.
Higher torque allows a smaller reduction ratio.
A smaller reduction ratio improves backdrivability.
When backdrivability improves, the tactile sensation received at the slave side becomes easier for the operator to feel.
Finally
Please allow us to briefly introduce our product.
The μDD Motor delivers up to 5 times the maximum torque for its size class. It should help improve backdrivability.
We support anyone interested in master-slave robots.
Want to touch one and try it? Want to build one? Want to grip a specific object? From those kinds of requests, we can prototype and develop the robot you want.
Master-Slave Robot Using μDD Motors