


EtherCAT-Compatible Compact Servo Driver

EtherCAT-Compatible Compact Servo Driver, Pre-Release Now Available
An EtherCAT-compatible model is now available for the driver used to run DD motors, from the world’s smallest class up to φ100.
Please make full use of it for your open and flexible development environment.
Features
EtherCAT combines high speed with highly accurate synchronization, making it possible to control DD motors with excellent responsiveness and repeatability.
Applications
1. High-precision positioning and synchronized control
・ Synchronized control of one or more axes (for example, systems that require multiple motors to operate in sync)
・ Accelerators and optical experimental equipment (micron-level precision positioning)
・ Multi-axis motion control (axis control for robots and automated assembly equipment)
2. Semiconductor and precision equipment fields
・ Wafer stage positioning (wafer transfer and alignment in semiconductor manufacturing equipment)
・ Electronic component mounters, chip mounters (precise placement of components on printed circuit boards)
・ Optical inspection equipment and laser markers (precision scanning and inspection processes)
3. Robotics
・ High-precision rotational control of robot arms (wrist joints of collaborative robots and rotary tables)
・ Synchronized control of articulated robots with 6 axes or more (controlled through EtherCAT real-time communication)
・ Control of surgical-assistance robots (high-precision motors for delicate motion control)
Product Specifications
| Model | MC-200-7220B: EtherCAT communication compatible |
| Supply voltage | Rated DC48V, DC20V-5% to 72V+5% |
| Continuous output | 3.5Arms |
| Maximum output current, less than 1 second | 20Arms |
| Drive method | Sine wave PWM method, 50kHz |
| Control modes | Cyclic Position Mode, Cyclic Synchronous Velocity Mode, Cyclic Synchronous Torque Mode, Homing Mode |
| Protection functions | Overcurrent, overload, overvoltage, undervoltage, overheating, encoder error, fuse-based burnout prevention |
| Communication functions | USB2.0 mini-B, parameter setting, status monitoring, command control |
| External command method | EtherCAT, connection experience with TwinCAT, Beckhoff |
| External dimensions | 132×67.2×25mm |
| Mass | 170g |
Outline Dimensions
MC-200-7220B, the outer dimensions are common for all MC-200 models

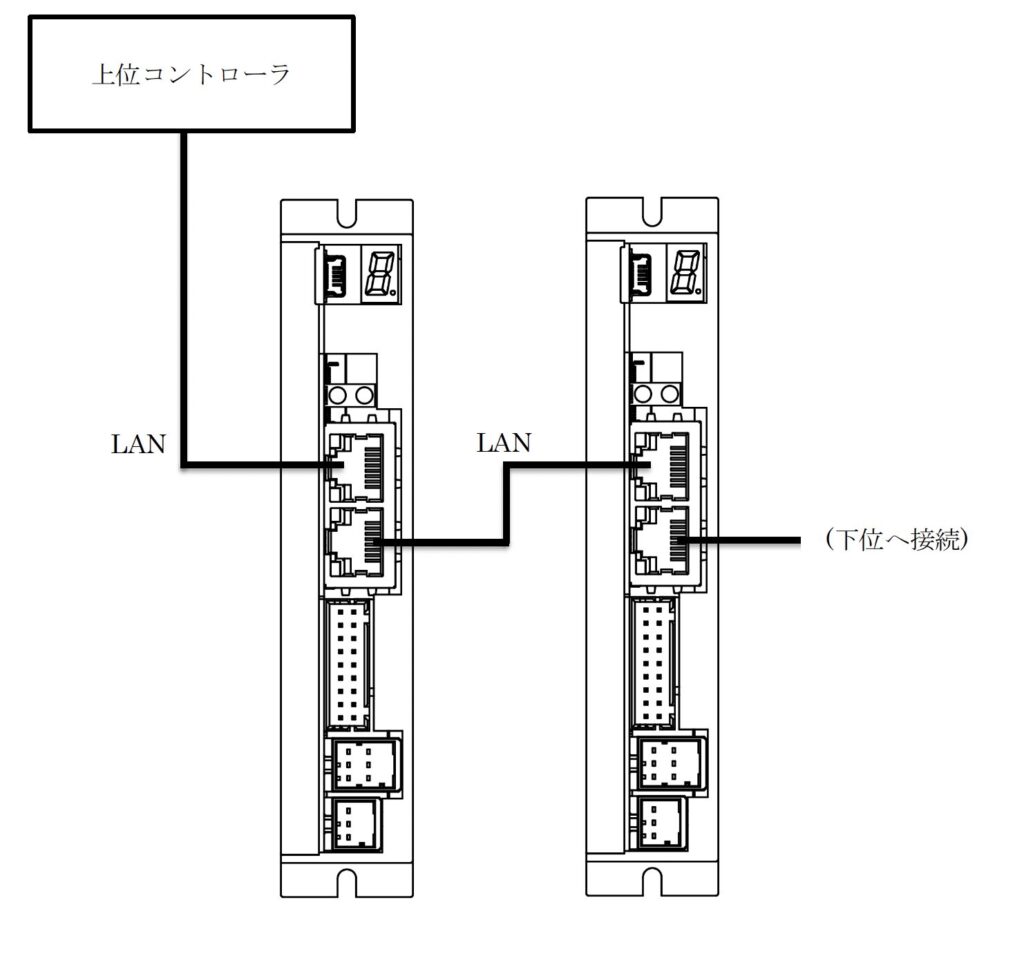
Connection Image
Control Method Guide
For details on how to control the MC-200B series with a PC or TwinCAT, please check the link below.
When controlling with TwinCAT
You can download the ESI file for driving μDD Motors from here. 2024.2.15
This link will take you to the members-only download page.
When controlling with a PC
Control is possible by connecting the driver to a PC with a USB cable.
In that case, please use the dedicated application, MTLParam.
(Supported OS: Windows 10, 32-bit/64-bit)
・You can set various parameters, monitor status, and perform command control.
・With the program function, various control operations can be driven by the driver alone.


