


Quiet Communication Assistance Robot
This case shows a communication robot prototype designed to reduce motor noise during gesture motion. The team used a μDD motor to improve quiet operation and smooth movement.
Robot Partner Designed for Quiet Operation
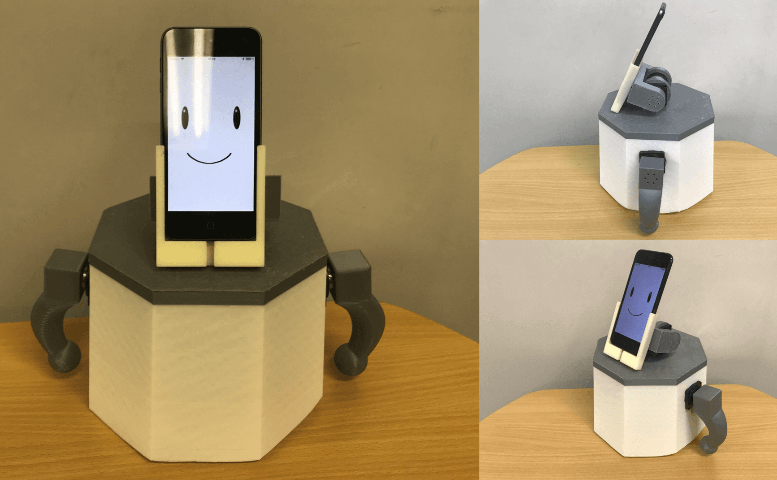
“New iPhonoid”
―
User: Tokyo Metropolitan University, Kubota Laboratory
Kubota Laboratory website: http://www.comp.sd.tmu.ac.jp/kubota-lab/hp/index_jp.htm
Research overview: View PDF
■ Excerpt from the research overview
Communication robots support information assistance in places such as airports, exhibition halls, and shopping centers. They are also used for services such as monitoring older adults and supporting daily health activities.
Many conventional communication robots have a problem: motor drive noise during gesture motion makes the robot’s speech hard to hear. The motor sound masks the voice.
To address this, the team built a robot partner prototype that uses a compact direct drive motor (μDD motor). The goal was quiet operation and smooth motion during gestures.
Why μDD motor: Quiet operation
Conventional iPhonoid

Uses a geared motor
New iPhonoid

Uses μDD motor
Noise measurement support: Kanagawa Institute of Industrial Science and Technology (KISTEC)
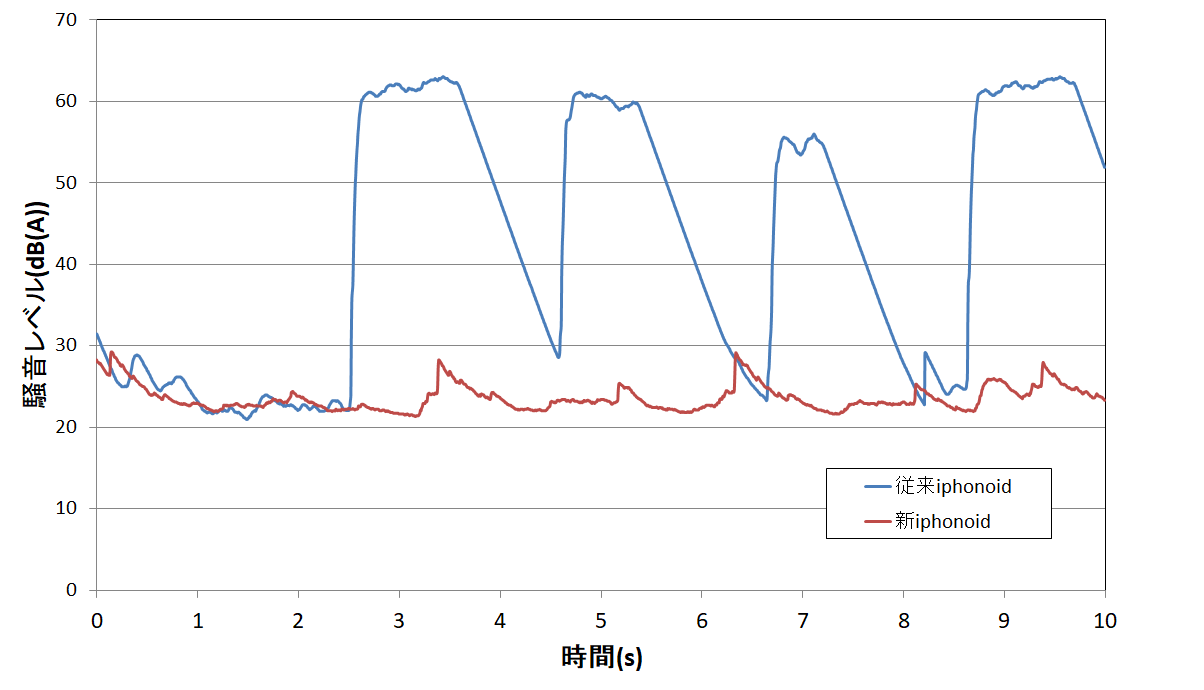
The graph above shows the measured noise level. The conventional iPhonoid recorded about 62 dB. The new iPhonoid recorded about 28 dB.
The conventional model has one motion sequence from 2.5 to 8 seconds (three patterns: raise the arm, return to center, return to attention). In all patterns it produces noise around 60 dB, similar to a bank counter or a family restaurant. For a robot used at home with older adults or small children, this level can interfere with conversation.
The new model has one motion sequence from 3 to 5 seconds (two patterns: raise the arm, return to attention). Noise rises by about 6 dB during the arm raise, but stays below 30 dB overall. This is lower than a hotel room and does not interfere with communication.
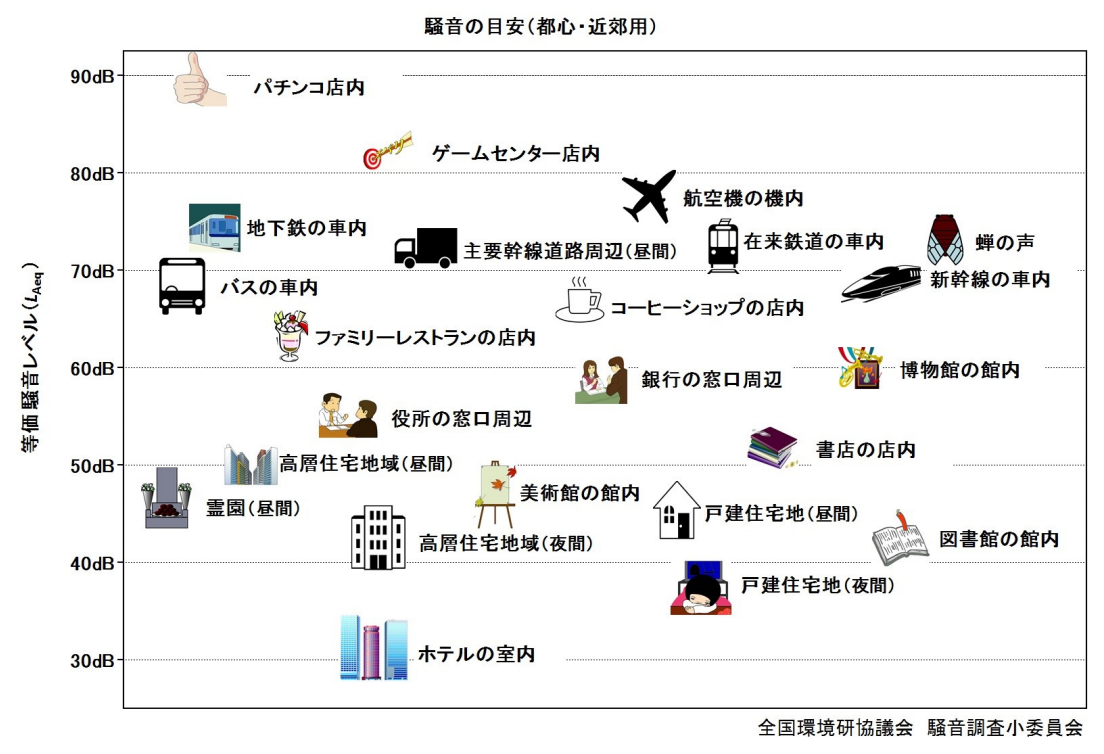
Noise reference (from Japan’s Ministry of the Environment website)
Main motor used
| Model | Product | Remarks | |
| 1 | MDH-3018-108KE | Ultra-compact direct drive motor | Outer diameter: φ30 mm, Resolution: 432,000 counts/rev Peak torque: 450 mNm |
Contact
If you are working on a robot that needs quiet gesture motion, share your axis layout, speed profile, and noise requirement. We will recommend a μDD motor model and integration approach.



